حمل رایگان با پست خرید بالای 2.500.000 تومان
نماد اعتماد

کانال تلگرام




در موتورهای براشلس برای انتخاب زاویه ارتباط مناسب نیازمند اطلاعات کافی درباره موقعیت روتور داریم و برای مشخص کردن موقعیت روتور از سنسور اثر هال استفاده میشود.
درایور یا کنترل کننده دور موتور برای تنظیم دور الکتروموتورها استفاده می شود.از دیگر قابلییت های درایور می توان به کنترل روی گشتاور موتورها اشاره کرد زمانیکه نیاز نیست از تمام توان موتور استفاده کرد درایور می تواند براساس نوع بار گشتاور مورد نیاز را تامین ئکند.
همچنین درایور قادر است چپگرد و راستگرد بودن موتور را تعیین کند و موتور را در برابر اضافه بار محافظت کند.
عملکرد کلی درایورها به این صورت است:
ابتدا ولتاژ سه فاز یا تکفاز AC توسط یکسوساز به ولتاژ DC تبدیل می شود. و این ولتاژ DC فیلتر می شود تا نوسانات ان گرفته شود.سپس با استفاده از پل سه فاز ولتاژ DC به روشهای مختلفی از جمله PWM، SPWM سوئیچ می شود. و در نهایت شکل موج نهایی فیلتر می شود تا هارمونیک های اضافی حذف شوند.
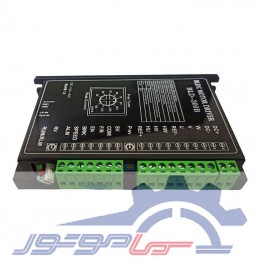
منبع تغذیه - (12 الی 30 ولت) | DC- | 1 |
منبع تغذیه +(12 الی 30 ولت) | DC+ | 2 |
تبادل U | U | 3 |
تبادل V | V | 4 |
تبادل W | W | 5 |
GND | REF- | 6 |
سنسور هال متقابل (W)HW | HW | 7 |
سنسور هال متقابل (V)H | HV | 8 |
سنسور هال متقابل (U)HU | HU | 9 |
ورودی قدرت سنسور هال 5V | REF | 10 |
پورت ورودی سیگنال آنالوگ | SV | 11 |
پورت مشترک | COM | 12 |
تبدیل سطح بالا به جلو در انتهای کنترل رو به جلو و معکوس (سازگار) | F/R | 13 |
سیگنالهای کنترل، عملکرد سطح پایین نیروگاه را فعال میکنند (منطبق با COM) | EN | 14 |
سیگنال کنترل سطح بالا عملیات پایانی ترمز (منطبق بر COM) | ALM | 15 |
این درایور براشلس 3 حالت مختلف تنظیم سرعت زیر را ارائه می دهد که کاربران می توانند یکی را انتخاب کنند:
پتانسیومترها بر روی درایو نصب می شوند و سرعت را می توان مستقیماً با چرخش پتانسیومتر تنظیم کرد.
انتهای ثابت پتانسیومتر خارجی به ترتیب به درگاه های سیگنال کنترل متصل می شود،همچنین می تواند توسط کنترلرهای دیگر کنترل شود. از صفر تا 5 ولت، سرعت موتور مطابق سرعت نامی (برای استفاده از این عملکرد، لطفاً RV را به چپ حرکت دهید).
staySV با GND می تواند دامنه را بین 5 ولت اعمال کند، فرکانس 1KHz ~ 10KHz سیگنال دیجیتال عرض پالس (PWM) تنظیم سرعت، سرعت موتور به صورت خطی توسط چرخه وظیفه تنظیم می شود (برای استفاده از این تابع، لطفاً RV حرکت به چپ حرکت دهید).
با کنترل پایانه ها EN نزدیک به com، استارت در موتور می تواند راه اندازی و توقف موتور را کنترل کند.
با کنترل ترمینال های F/R با ترمینال روشن-خاموش می توان جهت کار موتور را کنترل کرد.F/R با ترمینال در صورت عدم اتصال، موتور در جهت عقربه های ساعت کار می کند (Flip) برعکس، موتور در خلاف جهت عقربه های ساعت کار می کند. هنگامی که موتور فقط در حال کار است/سوئیچ بررسی معکوس است، موتور به طور خودکار ابتدا متوقف می شود، سپس به صورت معکوس شروع به کار می کند.
با کنترل ترمینال های BRK با ترمینال COM، محرک می تواند توقف ترمز موتور را کنترل کند. با ترمینال BRK هنگام قطع، موتور در حال کار است، ترمز موتور هنگام کار می ایستد، و ترمز سریعتر از توقف های معمولی، زمان توقف خاص متوقف می شود.
مشخصات
اولین نظر را شما ثبت کنید. ثبت نظر
اولین سوال را شما مطرح کنید. طرح سوال
مرجع: DBL00042
مرجع: DBL00014
مرجع: ِDBL00053
مرجع: DBL00016
مرجع: DBL00018
مرجع: DBL00001
مرجع: DBL00032
مرجع: DBL00055
مرجع: DBL00024
مرجع: DBL00021
مرجع: DBL00017
مرجع: DBL00013
مرجع: DBL00028
مرجع: DBL00036
مرجع: DBL00027
مرجع: DBL00047
 چگونه شارژر خورشیدی بسازیم
چگونه شارژر خورشیدی بسازیم راه اندازی و کار با ماژول سیم کارت SIM800L
راه اندازی و کار با ماژول سیم کارت SIM800L دیوار براشلس چیست و چگونه کار میکند؟
دیوار براشلس چیست و چگونه کار میکند؟ انواع جک برقی و مزایای آن
انواع جک برقی و مزایای آن اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟
اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟ جلوگیری از خوابیدن باتری موتور سیکلت
جلوگیری از خوابیدن باتری موتور سیکلت نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن
نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور
علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتورمرجع: CMB00010
مرجع: CMB00002