

حمل رایگان با پست خرید بالای 2.500.000 تومان
نماد اعتماد

کانال تلگرام





حمل رایگان با پست خرید بالای 2.500.000 تومان
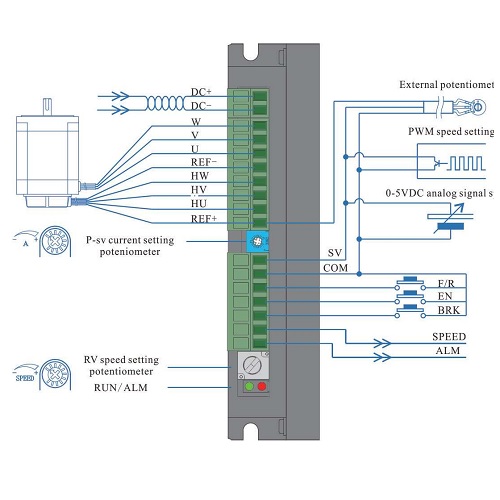
در موتورهای براشلس برای انتخاب زاویه ارتباط مناسب نیازمند اطلاعات کافی درباره موقعیت روتور داریم و برای مشخص کردن موقعیت روتور از سنسور اثر هال استفاده میشود.
درایور یا کنترل کننده دور موتور برای تنظیم دور الکتروموتورها استفاده می شود.از دیگر قابلییت های درایور می توان به کنترل روی گشتاور موتورها اشاره کرد زمانیکه نیاز نیست از تمام توان موتور استفاده کرد درایور می تواند براساس نوع بار گشتاور مورد نیاز را تامین ئکند.
همچنین درایور قادر است چپگرد و راستگرد بودن موتور را تعیین کند و موتور را در برابر اضافه بار محافظت کند.
عملکرد کلی درایورها به این صورت است:
ابتدا ولتاژ سه فاز یا تکفاز AC توسط یکسوساز به ولتاژ DC تبدیل می شود. و این ولتاژ DC فیلتر می شود تا نوسانات ان گرفته شود.سپس با استفاده از پل سه فاز ولتاژ DC به روشهای مختلفی از جمله PWM، SPWM سوئیچ می شود. و در نهایت شکل موج نهایی فیلتر می شود تا هارمونیک های اضافی حذف شوند.
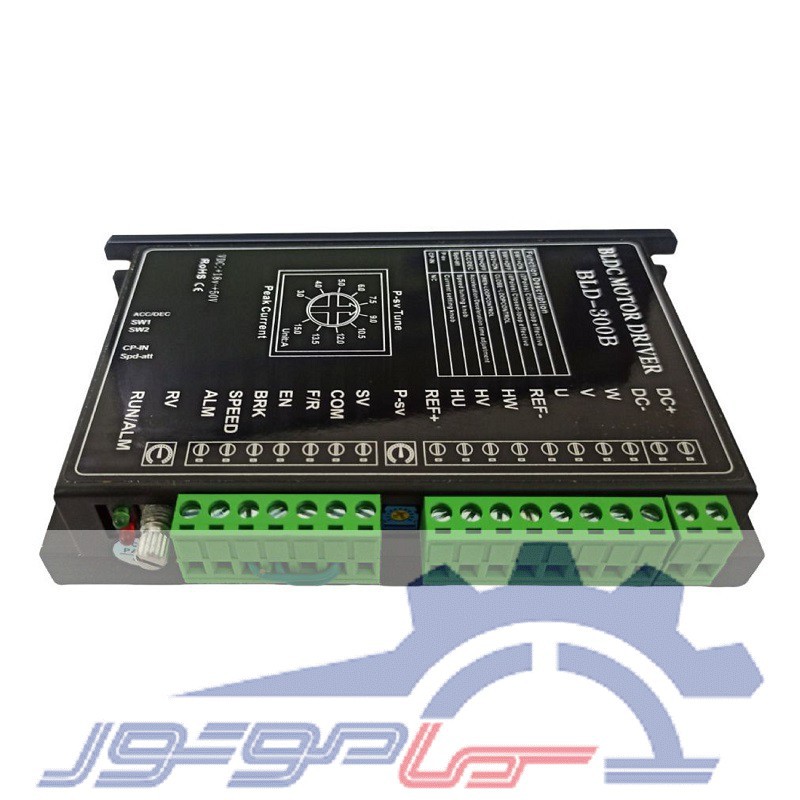
مشخصات
درایور BLD300 به عنوان کنترل الکتروموتور های براش لس با سنسور اثر هال تا توان 300 وات و ولتاژ 50 ولت از این درایور امکان کنترل سرعت و همچنین ترمز را دارد
دانلود (243.85KB)اولین نظر را شما ثبت کنید. ثبت نظر
اولین سوال را شما مطرح کنید. طرح سوال
مرجع: DBL00055
مرجع: DBL00025
مرجع: DBL00030
مرجع: DBL00052
مرجع: DBL00042
مرجع: DBL00048
مرجع: DBL00064
مرجع: DBL00036
مرجع: DBL00011
مرجع: DBL00003
مرجع: DBL00028
مرجع: DBL00013
مرجع: DBL00051
مرجع: DBL00026
مرجع: DBL00054
مرجع: DBL00044
 چگونه شارژر خورشیدی بسازیم
چگونه شارژر خورشیدی بسازیم راه اندازی و کار با ماژول سیم کارت SIM800L
راه اندازی و کار با ماژول سیم کارت SIM800L دیوار براشلس چیست و چگونه کار میکند؟
دیوار براشلس چیست و چگونه کار میکند؟ انواع جک برقی و مزایای آن
انواع جک برقی و مزایای آن اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟
اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟ جلوگیری از خوابیدن باتری موتور سیکلت
جلوگیری از خوابیدن باتری موتور سیکلت نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن
نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور
علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتورمرجع: WLM00001
















