حمل رایگان با پست خرید بالای 2.500.000 تومان
نماد اعتماد

کانال تلگرام





حمل رایگان با پست خرید بالای 2.500.000 تومان
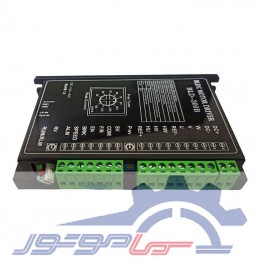
این درایور براشلس توانایی راه اندازی انواع موتور های براشلس که دارای سنسور اثر هال هستند را دارد. خروجی آن بصورت سه فاز بوده و سوکتی شامل 5 سیم برای نصب سنسور اثر هال دارد و برای موتورهای براشلس با زاویه 120 درجه طراحی شده است. یکی از ویژگی های بارز موتورهای براشلس امکان کنترل سرعت بسیار عالی می باشد. بدین صورت که با تغییر بار در خروجی، سرعت ثابت بوده و درایور با اعمال جریان بیشتر سرعت را ثابت نگه می دارد. این درایور با وزنی معادل 0.460 کیلوگرم و با ابعاد 42*84*147 (ارتفاع*عرض*طول) می باشد.
فایل راهنمای سیم بندی درایور را میتوانید از قسمت دانلود دریافت نمایید!
موتورهای براشلس DC در واقع موتورهای سه فاز سنکرون هستند که در ولتاژهای مختلفی کار می کنند. این موتورها روی استاتور خود سه سیم پیچ مستقل دارند و روتور آنها در واقع فقط یک آهنربا است که به جریان نیاز ندارد. بنابراین این موتورها فاقد جاروبک هستند. موتورهای براشلس برای ایجاد میدان مغناطیسی متغیر که باعث حرکت دورانی شود به یک ماژول الکترونیکی بنام درایور (راه انداز) نیاز دارند.
در واقع درایورها برای تنظیم دور الکتروموتورها استفاده می شود. علاوه بر آن درایورها قادرند روی گشتاور مورد نیاز موتورها کنترل داشته باشند برای مثال گاهی نیاز نیست از تمام توان موتور استفاده کرد در این حالت درایور می تواند براساس نوع بار گشتاور مورد نیاز را تامین کند.
همچنین در درایور می توان چپگرد یا راستگرد بودن موتور را تعیین کرد و موتور را نرم راه اندازی کرد و از موتور در برابر اضافه بار محافظت کرد.
راه اندازی موتور های DC براشلس از دو روش انجام می شود:
1- راه اندازی با سنسور: در موتورهای براشلس برای انتخاب زاویه ارتباط مناسب نیازمند اطلاعات کافی درباره موقعیت روتور هستیم و برای پیدا کردن موقعیت روتور از سنسور هال استفاده می شود. البته این روش معایبی هم دارد که می توان به ابعاد بزرگتر و هزینه بیشتر و محدودیت عملکرد در دماهای بالا( تقریبا 120 درجه سانتیگراد) اشاره کرد.
2- راه اندازی بدون سنسور: در این روش بجای استفاده از سنسور، از IC و برای کنترل سرعت از مدولاسیون عرض پالس PWM استفاده می شود. این روش مشکلات بالا را ندارد و تنها عیب آن پیچیدگی کنترل آن است.
در واقع درایورها واسط بین میکروکنترلر، منبع تغذیه و موتور می باشند و برای به حرکت درآوردن موتور بکار می روند. میکروکنترلرها سرعت و جهت را مشخص می کنند و درایور موتور، جریان را در ولتاژ مورد نظر فراهم میکند و برای اینکه یک موتور حرکت مناسبی داشته باشد هم به میکروکنترلر و هم به درایور نیازمند است.
_ ابتدا ولتاژ سه فاز یا تکفاز AC توسط یکسوساز(رکتیفایر) به ولتاژ DC تبدیل می شود.
_ ولتاژ DC ایجاد شده فیلتر می شود تا نوسانات اضافی آن گرفته شود.
_ با استفاده از پل سه فاز(متشکل از المانهاییی مثل IGBT) ولتاژ DC سوئیچ می شود.سوئیچ به روشهای مختلفی مثل PWM یا SPWM یا برداری است.
_ در آخر شکل موج نهایی فیلتر می شود تا هارمونیک های اضافی حذف شوند.( این مرحله در همه درایورها وجود ندارد)
مشخصات
اولین نظر را شما ثبت کنید. ثبت نظر
اولین سوال را شما مطرح کنید. طرح سوال
مرجع: DBL00001
مرجع: DBL00052
مرجع: DBL00013
مرجع: DBL00028
مرجع: DBL00042
مرجع: DBL00054
مرجع: DBL00007
مرجع: DBL00035
مرجع: DBL00015
مرجع: DBL00043
مرجع: DBL00004
مرجع: DBL00051
مرجع: KEB00010
مرجع: DBL00006
مرجع: KEB00012
مرجع: DBL00017
 چگونه شارژر خورشیدی بسازیم
چگونه شارژر خورشیدی بسازیم راه اندازی و کار با ماژول سیم کارت SIM800L
راه اندازی و کار با ماژول سیم کارت SIM800L دیوار براشلس چیست و چگونه کار میکند؟
دیوار براشلس چیست و چگونه کار میکند؟ انواع جک برقی و مزایای آن
انواع جک برقی و مزایای آن اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟
اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟ جلوگیری از خوابیدن باتری موتور سیکلت
جلوگیری از خوابیدن باتری موتور سیکلت نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن
نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور
علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتورمرجع: CMT00120
مرجع: CMT00095
برند: دسته گاز
مرجع: CMT00117
مرجع: CMB00010
مرجع: CMT00122
مرجع: PCH00012
مرجع: PCH00094
مرجع: CMK00049
مرجع: CMB00002
مرجع: CMP00096
مرجع: CMK00052
مرجع: CMK00053
مرجع: CMP00097