
- حراج!
بلاگ

نماد اعتماد

کانال تلگرام



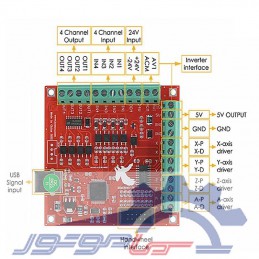
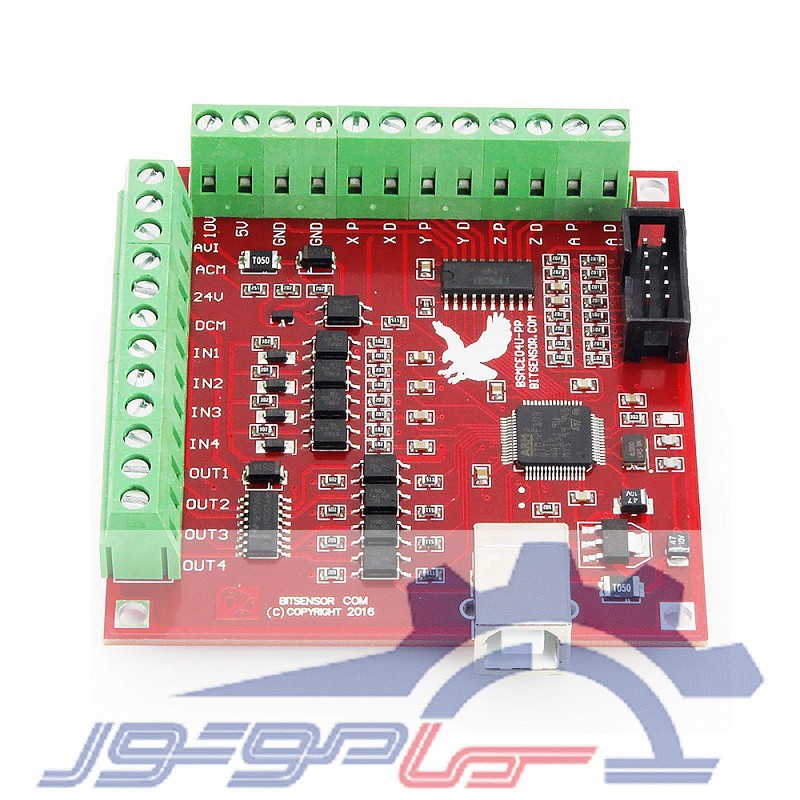
برد کنترلر mach3 چهار محور CNC
4 محور (استپر یا سروو)
ارتباط USB
کنترلر STM32
4 پورت ورودی و 4 پورت خروجی
جدیدترین ورژن نرمافزار
 سیاستهای امنیتی
سیاستهای امنیتی
(ویرایش با ماژول اعتمادسازی مشتری)
 سیاستهای تحویل
سیاستهای تحویل
(ویرایش با ماژول اعتمادسازی مشتری)
 سیاستهای بازگشت کالا
سیاستهای بازگشت کالا
(ویرایش با ماژول اعتمادسازی مشتری)
راهاندازی یک سیستم CNC (کنترل عددی رایانهای) برای فرزکاری و حکاکی با استفاده از نرمافزار Mach3، یک روند پیچیده به نظر میرسد. اما با راهنمایی صحیح و دقیق، میتوانید CNC خود را با استفاده از این نرمافزار قدرتمند راهاندازی کنید. در این مقاله، به شما توضیح میدهیم چگونه CNC خود را با استفاده از Mach3 راهاندازی کنید و به طور کامل از امکانات و قابلیتهای آن بهرهبرداری کنید.
نصب و پیکربندی نرمافزار Mach3: ابتدا نرمافزار Mach3 را از منبع معتبری دانلود کنید و روی سیستم خود نصب کنید. سپس مراحل پیکربندی اولیه را انجام داده و تنظیمات مربوط به محورها، ورودی/خروجی و ماشینکاری را تکمیل کنید. این تنظیمات شامل انتخاب درایورها، تنظیمات پورت و بررسی تطبیق محورها با سیستم ماشینکاری شما میشود.
کانفیگ و تنظیمات سختافزاری: پس از نصب Mach3، باید سختافزار CNC خود را به سیستم متصل کنید. این شامل اتصال موتورها، سنسورها و سایر اجزای مکانیکی CNC به درایورها و پورتهای ورودی/خروجی سیستم است. با استفاده از تنظیمات Mach3 و دستورالعملهای تأمین کننده CNC خود، سختافزار را به درستی پیکربندی کنید.
تعریف و بررسی کد G: کد G، که به عنوان زبان CNC استفاده میشود، برای کنترل حرکت محورها، سرعتها و دستورات دیگر در ماشینکاری CNC استفاده میشود. شما باید با تعریف و بررسی کد G آشنا شوید تا بتوانید برنامههای ماشینکاری مورد نظر را ایجاد کنید و به درستی اجرا کنید.
تست و راهاندازی اولیه: پس از تنظیمات و پیکربندیهای مورد نیاز، میتوانید به تست و راهاندازی اولیه CNC خود بپردازید. این شامل اجرای برنامههای ساده ماشینکاری، بررسی حرکت محورها، کنترل سرعت و اطمینان از صحت و درستی عملکرد cnc است.
برد کنترلر CNC چهار محور سازگار با نرم افزار mach 3 به منظور کنترل سی ان سی های حداکثر تا ۴ محور مورد استفاده قرار می گیرد. برد کنترلی سی ان سی ۴ محور به شما این اجازه را می دهد تا به وسیله ی هر کامپیوتری که بر اساس سیستم عامل ویندوز کار می کند دستگاه سی ان سی خود را کنترل نمایید. کنترلرهای قدیمی که دارای پورت LPT بودند، مصرف کننده را محدود به استفاده از کامپیوترهای قدیمی می کردند که دارای پورت LPT بودند. اما بردهای کنترلی جدید این محدودیت را از بین برده اند به طوری که حتی با یک تبلت نیز می توان سی ان سی را کنترل نمود.
نرم افزار Mach3 یکی از محصولات شرکت ArtSoft است که رایانه شما را به یک ماشین کنترلر قدرتمند CNC تبدیل میکند. این نرم افزار ابزارهای بسیار متنوعی برای این منظور در اختیاز شما قرار می دهد و بسیاری از نیا زهای مطرح برای کنترل CNC را در نظر گرفته است.نرم افزار مچ تری میتواند حرکت موتورهای پله ای و سروو را از طریق پردازش جی کدها کنترل کند و بر روی نسخه های مختلف ویندوز قابل نصب است. این برنامه به راحتی قابل سفارشی شدن است و با طبف وسیعی از سخت افزارهای مختلف قابل نصب و اجرا است. قابلیتهای گسترده این برنامه در کنار انعطاف بالای آن باعث شده تا به یکی از بهترینهای این حوزه مبدل شود.نرم افزار مچتری مانند یک کنترلر شش محور عمل میکند و بهترین نرم افزار برای CNC های PC-based یا بر پایه پی سی است.نرم افزار مچ تری قابلیت تغییر ظاهر صفحه را دارد و به راحتی میتواند با یک منوی فارسی ساده به اپراتور ارائه گردد.این نرم افزار امکان پردازش جی کد از نرم افزار آرت کم و مستر کم را دارد.
فایل نصب این نرم افزار در قسمت دانلود ها قابل دانلود است
اگر شما برای اولین بار است که نرم افزار مچ تری را بر روی دستگاه نصب می نمایید باید تنظیمات دستگاه خود را انجام دهید. این تنظیمات شامل پارامترهای موتور ، تنظیمات رفرنس ها ، جهت های حرکت و ورودی ها و خروجی ها و … می باشد.
نرم افزار مچ تری دارای امکاناتی است که در برنامه آورده شده است اما به کار برده نشده است می توانید این موارد را برای دستگاه سی ان سی خود ست نمایید . به عنوان نمونه برای ایجاد ابزار تولزچنج در فرزها باید یک تغییر در یک برنامه الحاقی داده شود . این موارد در ادامه به تفصیل توضیح داده خواهد شد.
بعد از تنظیمات دستگاه خود می توانید فایل Mach 3 mill .xml را که در شاخه Mach 3 در کامپیوتر می باشد را بعنوان بک آپ بردارید و در جای دیگر ذخیره نمایید هربار که مچ تری را نصب می نمایید. با برگرداندن فایل به شاخه اصلی همه اطلاعات تنظیمات به جای خود mach3mill.xml بر می گردد.
در این راستا تب بعدی خروجی های مربوط به موتور است . این منو به نرم افزار مچ تری می گوید که ما چه تعداد موتور را می خواهیم کنترل نماییم و کدام پین از پورت پرینتر مربوط به کدام موتور است . در اینجا ما سه محور X ,Y Z را در نظر می گیریم. بنابراین در ستون اول و روبروی سه محور مذکور تیک سبز رنگ فعال سازی را انجام
دهید.
ستون دوم شماره پینی را که جهت ارسال پالس به درایو موتورها وصل می شود را تعیین می کند . در این ستون جهت موتور X شماره پین ۲ برای ارسال پالس در نظر گرفته شده است. و برای Y پین شماره ۴
برای Z پین شماره ۶
ستون سوم مانند ستون دوم است اما تعیین کننده جهت دوران درایو موتورها می باشد . شماره پین ها برای
محورها به ترتیب ۳ و ۵ و ۷ برای این دستگاه در نظر گرفته شده است.
در عمل ممکن است این پین ها برای دستگاههای مختلف متفاوت در نظر گرفته شود. اگر شما خودتان سیم
کشی دستگاه را انجام داده ایدمی دانید کدام پین مربوط به کدام درایو است . اما اگر دستگاه را خریداری کرده
اید به کتابچه اطلاعات که سازنده در اختیار قرار داده است مراجعه نمایید . ستون های چهار و پنجم بستگی به
این دارد که درایو ها چگونه عمل می کنند و سیم کشی برد شما چگونه است.
در بیشتر درایوها از ورودی های ایزوله شده اپتوکوپلری ( نوری ) استفاده می شود و معمولا با برق ۵+ ولت DC از کامپیوتر تغذیه می شوند. ورودی پالس و دایرکشن که به کامپیوتر وصل شده اند. با وصل زدن زمین پورت پارالل موجب می شود تا زمین مورد نیاز LED های اپتوکوپلر وصل شود و یک پالس ایجاد شود و موتور به اندازه یک پالس حرکت نماید.
در این حالون Dir low active را باید تیک بزنیم و حالت active low را انتخاب نماییم.
بسیار عالی، ما اتصالات فیزیکی برای موتورها را معین کردیم . مورد بعدی که باید به آن توجه کنیم باید
تنظیمات مربوط به تعداد پالس برای حرکت را انجام دهیم و سپس موتورها را در عمل حرکت دهیم . اما ما قبلا
باید چند مورد بسیار مهم را برای سیستم تعریف کنیم.
اطلاعات فوق بصورت عمومی بود. شما برای این کنترلر جدول تنظیمات محور C و B و A و Z و Y و X
در شکل نشان داده شده است. تنظیمات را مطابق شکل نشان داده شده انجام دهید
اگر موتور شما معکوس حرکت می کند قسمت Dir Low را معکوس نمایید اگر ضربدر است تبدیل به تیک نمایید و اگر تیک است آنرا ضربدر نمایید.
کلید های رفرنس Home switches شاید شما متوجه شده باشید که نرم افزار مچ تری در خصوص نحوه استفاده ااز ورودی و خروجی ها بسیار انعطاف پذیر است . این امکان در آن وجود دارد که سوییچ های رفرنس و محدوده های حرکت را به راههای مختلف استفاده نماییم . اما ما در این آموزش ما فقط به تنظیمات کلیدهای رفرنس برای ه ر محور می پردازیم که بصورت سری سیم کشی شده اند . در خصوص سخت افزار و بردهای واسط بحث نمی کنیم اما معمولا کنتاکت هوم سوییچ ها در حالت نرمال بصورت بسته می باشد.
Normal close توسط یک سیم از پین شماره ۱۰ تا پین زمین پورت پارالل بصورت سری وصل شده است.
برای فعال کردن هوم سوییچ ما باید ورودی آن را فعال نماییم.در منوی Config گزینه Ports and Pins را انتخاب وسپس تب Input Signals را کلیک نمایید . ورودی های Z home و Yhome و Xhome را فعال نمایید و قسمت Ports# را روی ۱ و پین را روی ۱۰ قرار دهید و تیک Active low را روی هر سه قسمت فعال نمایید.
شما اکنون می توانید امکانات قدرتمند مچ تری را ملاحظه نمایید . اگر چه ما سه محور داریم ولی آنها را بصورت سری وصل کردیم و به یک ورودی وصل نموده ایم . مچ تری در ابتدا یک محور را حرکت می دهد تا میکروسوییچ مربوط به آن محور عمل نماید . سپس حرکت معکوس را انجام داده تا کنتاکت مجدد بسته شده و عملیات رفرنس خاتمه پذیرد . سپس به سراغ محور بعدی می رود و آن را رفرنس می نماید و بعد محور سوم . این روش همچنان برای لیمیت سوییچ ها ( محدوده های حرکت ) نیز امکان پذیر است. مچ تری بعد از اینکه عملیات رفرنس گیری را انجام داد می تواند میکرو سوییچ ها را تغییر ماهیت داده از حالت رفرنس به حالت لیمیت سوییچ در نظر بگیرد.
برای تست تنظیمات اعمال شده و ارتباطات درست با سخت افزار به قسمت Diagnostics ( تب بالای صفحه مچ تری ) بروید و LED های مربوط به M3 Home و M2 Home و M1 Home را مشاهده نمایید. با عمل کردن هرکدام از میکروسوییچ های سه محور باید LED ها روشن و خاموش شوند. ( فشردن دستی میکروسوییچ ها و یا در صورتیکه از پرکسیمیتی سوییچ ها استفاده می کنید با قراردادن یک صفحه فلزی برابر آنها )
مطالب فوق بصورت کلی بود . برای این کنترلر بصورت پایه جدول را مطابق شکل پر نمایید.
اگر ستون Active Low را تیک می زنید به این مفهوم است که ورودی با وصل شدن به زمین فعال می شود . بعنوان مثال یک سر میکرو سوییچ به کنترلر و سر دیگر به پایه منفی منبع تغذیه وصل می شود.
پارامترهای رفرنس دستگاه
الان وقت آن رسیده که برای نرم افزار مچ تری تعریف کنیم که برای کدام محورها میکروسوییچ های رفرنس نصب شده است. در بیشتر مواقع این احتمال وجود دارد که محورهای Y و X برای رفتن به رفرنس در جهت منفی حرکت کنند . محور Z بطور معمول برای رفتن به رفرنس در جهت مثبت حرکت می کند . البته دقت کنید که برای صفر کردن محورها گرچه محور Z در جهت مثبت حرکت می کند اما همه حرکتها در جهت منفی حرکت اصلی هستند . در ایننجا ما نحوه تنظیم کردن را شرح می دهیم. برای تنظیم کردن محورها بخش Home/Limits از منوی Config را انتخابکنید. وقتی بر روی آن کلیک نمایید دیالوگ شکل زیر را خواهید دید.
از آنجاییکه برای رفرنس محورهای Y و X باید محورها در جهت منفی حرکت کنند پس گزینه Home neg مقابل محورهای Y و X را تیک بزنید و برای محور Z تیک نخورده باشد . اگر ما گزینه Auto Zero را فعال کرده باشیم، موقعیت محورها بعد از رفرنس شدن صفر خواهد شد . ما باید میکروسوییچ ها را در انتهایی ترین نقطه حرکت از محورها نصب نماییم. اما اگر میکرو سوییچ ها در مکانی غیر از انتهایی ترین نقطه حرکت بودند ، می توانیم به مچ تری مکان نقطه انتهایی بعد از میکرو سوییچ را معرفی نماییم . مثلا بگوییم نقطه رفرنس ۵ سانتیمتر آنطرف تر از محل میکروسوییچ می باشد. این مقادیر را در ستون Home Off باید وارد نماییم. این عدد به مچ تری می گوید نقطه صفر کجاست و عدد ستون Home Off را به جای صفر جایگزین می کند.
عدد منظور شده در Speed% تعیین می کند که سرعت رفتن دستگاه به حالت رفرنس چند درصد از سرعت حالت عادی دستگاه باشد. این عدد در دستگاههای مختلف فرق می کند . بطور معمول باید سرعت حرکت باید آرام باشد و نیاز به مقداری سعی و خطا می باشد
مطالب فوق بصورت عمومی می باشد . برای این دستگاه حداقل تنظیمات به صورت تنظیمات شکل می باشد
جهت حرکت به سمت Home در قسمت Home Neg تعیین می شود. در صورتیکه رفتن به سمت Home در خلاف جهت است علامت این قسمت را معکوس نمایید
بعد از اطمینان از اتصالات سیمی میکروسوییچ ها و تنظیمات زمان تست رفرنس گیری می رسد . در حالتی که E-Stop غیر فعال است به قسمت Program Run رفته و بر روی کلید Ref All Home را کلیک نمایند . در این حالت محور Z به سمت بالا شروع به حرکت کرده تا میکرو سوییچ مربوط به آن تحریک شود و سپس بازگشت صورت می گیرد تا میکروسوییچ به حالت اول بازگردد . سپس محور Y و در نهایت محور X به همین ترتیب عمل می نامیند تا آن محورها هم به رفرنس بروند. اگر هرکدام از محورها به رفرنس بروند نمایشگر عدد صفر و یا عددی که شما در قسمت Home Off درج کرده اید را نشان می دهد. اگر می بینید که هنگام رفرنس کردن محورها برعکس حرکت می کنند به قسمت تنظیمات رفرنس در بخش Home / Limits بروید و قسمت Home Neg را تغییر دهید.
نرم افزار مچ تری می تواند با نظارت دائمی بر روی مکان حرکت باعث جلوگیری از تصادف و خسارت به دستگاه شما شود اگر شما و یا برنامه Gcode لاش کند تا به خارج از محدوده کاری تعریف شده برود به آنجا نخواهد رفت و شما با یک آلارم هشدار دهنده خطا مواجه می شوید . برای اینکه بخواهیم تنظیمات مربوط به این حالت را انجام دهیم به پنجره شکل که Home/Limits می باشد می رویم
از آنجاییکه ما میکروسوئیچ های رفرنس را در انتهایی ترین قسمت محورهای Y و X قرارداده ایم و دستگاه در حالت رفرنس در آنجا قرار دارد پس برای این دو محور قسمت Soft Min را برابر صفر قرار می دهیم . به این ترتیب به ماشین اجازه نمی دهیم که آن طرف نقطه صفر برود و منفی شود . در قسمت Soft Max ما تعیین می کنیم که محورها به چه میزان می توانند به سمت جلو حرکت نمایند . در اینجا ما عدد ۳۰۰ را برای محور X و عدد ۱۰۰ را برای محور Y در نظر گرفته ایم . برای محور Z ما مجبور هستیم که در جهت مثبت حرکت کنیم و در محل رفرنس عدد صفر را داشته باشیم، پس عدد Soft Max برابر صفر می شود و از آنجاییکه این محور بطور مثال باید ۱۰۰ میلیمتر پایین بیاید پس ما مجبوریم عدد ۱۰۰ – ( منفی صد ) را برای Soft min در محور Z در نظر بگیریم.
عدد مندرج در Slow Zone بیانگر مقدار فاصله ت ا محدوده رفرنس است . بدین مفهوم که وقتی محور در حالت دستی یا اتوماتیک در حال حرکت به سمت رفرنس می باشد، قبل از رسیدن به انتها به میزان عدد معلوم شده شروع ک =به کاهش سرعت می کند . اگر ما این عدد را ۳ در نظر گرفته باشیم و دستگاه با ماکزیمم سرعت به سمت رفرنس حرکت کند به محض رسیدن به سه واحد مانده به رفرنس سرعت کاهش می یابد . این کار باعث می شود تا دستگاه از ایجاد ضربات ناشی از توقف ناگهانی موتور مصون بماند.
گرچه این توقف ناگهانی فقط در حالت حرکت دستی اتفاق می افتد و در حالت اجرای G-code این اتفاق نخواهد افتاد. برای امتحان محدوده های حرکت ما نیاز داریم در ابتدا دستگاه به رفرنس برود.سپس ما نیاز داریم تا محدوده های نرم افزاری را فعال سازیم برای اینکار کلیدی را که روی آن برچسب Soft Lomits در بخش Programm Run نوشته شده را کلیک نمایید. وقتی LED دور کلید سبز رنگ شد به معنی فعال شدن لیمیت ها می باشد و ما می توانیم بصورت دستی محدوده های حرکت را تست نماییم. امیدوارهستیم که شما بتوانید اینکار را انجام دهید . در صورتیکه اشکالی در کار باشد در متن زیر صفحه پیام خطا داده می شود.
کنترلر مچ تری بر مبنای دو واحد متریک و اینچ کار میکند.
واحد از اینچ به میلیمتر تغییر می کند که برای اعمال تغییر باید نرم افزار را یک بار ببندید و سپس دوباره اجرا کنید.
جهت مشاهده واحد فعال در مچ تری می توانید در تب setting در قسمت پایین سمت راست واحد فعال را مشاهده نمایید.
جهت تنظیم پورت ها در منوی config بر روی گزینه ports and pins کلیک نمایید..
در صفحه باز شده ۷ بخش قابل تعریف می باشند که عبارتند از:
این بخش به ۲ قسمت تقسیم می شود. یک قسمت مربوط به تنظیمات پورت پارالل می باشد. بخش دوم استفاده از رابطهای USB و … یکی از این دو حالت باید تنظیم شود.
در صورتیکه از پورت پارالل استفاده می نمایید Port#1 تیک مربوط به فعال کردن پورت را بزنید کد سخت افزاری پورت پارالل خود را در قسمت Port Address قرار دهید.
در صورتیکه از پورت دوم پارالل استفاده می کنید ،تیک مربوط به فعال کردن پورت دوم را بزنید و آدرس پورت دوم را در قسمت Port Address قرار دهید.
در استفاده از پورت دوم معمولا پورت اول جهت حرکت موتورها استفاده می شود و از پورت دوم جهت کنترل سایر بخش های دستگاه استفاده می شود. در اینصورت با زدن تیک پایین کادر ،پین های ۲ تا ۹ بعنوان ورودی شناخته خواهد شد.
در بخش Kernel Speed شما نرخ انتقال اطلاعات از کامپیوتر به دستگاه cnc را تعیین می کنید.
توجه نمایید که بعد از تغییر سرعت باید نرم افزار بسته و سپس دوباره اجرا شود تا اثر تغییرات در نرم افزار محاسبه شود
برای کنترل دستگاه های CNC از نرم افزارهای مختلفی استفاده می شود که یکی از قدرتمندترین و کارآمد ترین آن ها نرم افزار Mach3 می باشد. این نرم افزار توسط شرکت ArtSoft منتشر شده و قابلیت کنترل دستگاه های CNC که برای برش پلاسما، فرز و تراش مورد استفاده میگیرد را دارا می باشد
دانلود (676.79KB)مرجع: MDL00041
 چگونه شارژر خورشیدی بسازیم
چگونه شارژر خورشیدی بسازیم
 راه اندازی و کار با ماژول سیم کارت SIM800L
راه اندازی و کار با ماژول سیم کارت SIM800L
 اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟
اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟
 جلوگیری از خوابیدن باتری موتور سیکلت
جلوگیری از خوابیدن باتری موتور سیکلت
 نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن
نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن
 علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور
علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور
 همه چیز در مورد ماژول لیزر و کاربرد آن
همه چیز در مورد ماژول لیزر و کاربرد آن
 تبدیل دوچرخه معمولی به موتور
تبدیل دوچرخه معمولی به موتور
مرجع: DST00001
مرجع: DST00020
مرجع: DST00013
مرجع: DST00008
مرجع: DST00017
مرجع: DST00016
مرجع: DST00003
برد کنترلر mach3 چهار محور CNC
4 محور (استپر یا سروو)
ارتباط USB
کنترلر STM32
4 پورت ورودی و 4 پورت خروجی
جدیدترین ورژن نرمافزار







