مرجع: MST00029
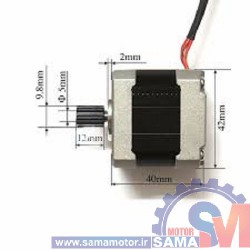
استپر موتور موتور 2 فاز 6 سیم 17HD1029-01N
کد محصول : MST00029 دوفاز6 سیمدارای دمپر(لرزش گیر)
1,180,000ریال
ناموجود
حمل رایگان با پست خرید بالای 2.500.000 تومان
نماد اعتماد

کانال تلگرام


کد محصول : MST00025
پارت نامبر 103H6703-0456
ساخت ژاپن
SANYO DENKI
گام 1.8 درجه
گشتاور 5Kg.cm
جریان فاز 2 آمپر
دارای دمپر
حمل رایگان با پست خرید بالای 2.500.000 تومان
هرچند کاربرد استپر موتورها امروزه بسیار گسترده است اما استپ موتورها را می توان در وسایلی مانند CNC ها، پرینترهای سه بعدی (3D PRINTS)، پرینتر های جوهر افشان، اسکنر ها، پلاتر ها، فلاپی درایو ها، دی وی دی درایو ها (DVD Drive)، لنز بعضی از دوربین های دیجیتال یافت که البته این موارد گوشه ای از کاربرد استپ موتور هاست. به طور کلی برای سیستم هایی که نیاز است موقعیت دقیق (افقی، عمودی) یا زاویه دقیق را تعیین کنیم می توانیم از استپ موتور ها استفاده نماییم.
استپ موتور ها در ساخت ماشین های عددی مانند CNC در صنعت استفاده های فراوانی دارند. همچنین استپ موتور ها در صنایع رباتیک نیز کاربرد وسیعی برای ساخت بازوها و سایر اجزای دقیق ربات را به خود اختصاص داده اند.
استپر موتور در صنایع خودروسازی نیز کاربرد دارد و یکی از موارد کاربرد استپ موتور در خودروها کنترل میزان دور موتور (گاز)، افزایش دور موتور هنگام استفاده از کولر، جلوگیری از کاهش ناگهانی دور موتور و در کل ایجاد تعادل و کنترل دور موتور می باشد.
موتورهای DC زغالی زمانیکه ولتاژ به ترمینالهای آنها تزریق میگردد به نرمی حرکت میکنند. استپ موتور بوسیله قابلیت تبدیل پالسهای ورودی به فواصل کوچک مشخص در موقعیت شفت شناخته میشوند. هر پالس شفت را به یک زاویه مشخص میبرد. استپ موتورها اساساً دارای دندانههای مغناطیسی در اطراف یک شفت مرکزی از جنس آهن میباشند. الکترومغناطیسها بوسیله یک مدار راه انداز خارجی یا یک میکروکنترلر تغذیه میگردند. جهت چرخاندن شفت ابتدا به یکی از مغناطیسها توان داده میشود، که مغناطیس باعث جذب دندانههای دنده میگردد. زمانیکه دندانه دنده روبروی اولین مغناطیس میایستد، نسبت به مغناطیس بعدی دارای یک فاصله میباشد. این به معنای آنست که در صورت روشن شدن الکترومغناطیس بعدی و خاموش شدن اولی دنده به آهستگی میچرخد تا دندانه روبروی مغناطیس دوم قرار گیرد. از آنجا فرایند آغاز میگردد. هر یک از این چرخشها یک گام (استپ) نامیده میشود، تعداد مشخصی از این گامها یک دور کامل موتور را میسازند (دقت شود نسبت تعداد گامها به دور موتور همواره یک عدد صحیح است). و به این ترتیب یک موتور میتواند با زوایای مشخص بچرخد.
چهار نوع اصلی از استپ موتورها وجود دارد:
روتور موتورهای مغناطیس دائم(PM) از مغناطیسهای دائم تشکیل گردیده است و با جاذبه و دافعه بین مغناطیس روتور و مغناطیس استاتور عمل مینماید. موتورهای با مقاومت مغناطیسی متغیر از یک صفحه آهنی به عنوان روتور استفاده گردیده و بر این اساس عمل مینماید که حداقل مقدار مقاومت مغناطیسی، زمانیکه روتور در حال جذب به سمت قطبهای استاتور است، زمانی رخ میدهد که حداقل فاصله وجود دارد. گروه سوم را به این دلیل هیبرید مینامند که در ساختار آنها از دو تکنیک مغناطیس دائم و مقاومت مغناطیسی متغیر با هم، جهت رسیدن به حداکثر توان در کوچکترین فضا استفاده شده است.
کنترل دیجیتالی ساده
فاقد خطای تجمعی
توقف ناگهانی بدون آسیب
بدون جاروبک
بدون نیاز به فیدبک
پایدار
ساختمان مکانیکی ساده
راهاندازی ساده و ارزان
عدم نیاز به سرویس و نگهداری
مشخصات
اولین نظر را شما ثبت کنید. ثبت نظر
اولین سوال را شما مطرح کنید. طرح سوال
مرجع: MST00029
مرجع: MST00064
مرجع: MST00179
مرجع: MST00032
مرجع: MST00019
مرجع: MST00059
مرجع: MST00048
مرجع: MST00009
مرجع: MST00047
مرجع: MST00049
برند: MOONS
مرجع: MST00017
مرجع: MST00007
مرجع: MST00169
مرجع: MST00036
مرجع: MST00011
مرجع: MST00182
 چگونه شارژر خورشیدی بسازیم
چگونه شارژر خورشیدی بسازیم راه اندازی و کار با ماژول سیم کارت SIM800L
راه اندازی و کار با ماژول سیم کارت SIM800L دیوار براشلس چیست و چگونه کار میکند؟
دیوار براشلس چیست و چگونه کار میکند؟ انواع جک برقی و مزایای آن
انواع جک برقی و مزایای آن اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟
اسلیپ رینگ Slip Ring یا روتاری کانکتور چیست؟ جلوگیری از خوابیدن باتری موتور سیکلت
جلوگیری از خوابیدن باتری موتور سیکلت نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن
نحوه برقی کردن دوچرخه و لوازم مورد نیاز آن علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور
علت صدای ترانسفورماتور چیست؟ و راه حل های کاهش صدای ترانسفورماتور کد محصول : MST00025
پارت نامبر 103H6703-0456
ساخت ژاپن
SANYO DENKI
گام 1.8 درجه
گشتاور 5Kg.cm
جریان فاز 2 آمپر
دارای دمپر